Autonomous Driving System
The objective of the CARLA project is to create an Autonomous Driving System (ADS) that would run on the open-source simulator CARLA, which closely models real-life driving conditions with diverse maps, weather conditions and traffic scenarios.
ADS is a path-breaking development in the field of transportation, and several tech and auto giants have already ventured into this field. Now, with open-source platforms to test and improve algorithms, developers across the globe have the opportunity to contribute to autonomous driving research.
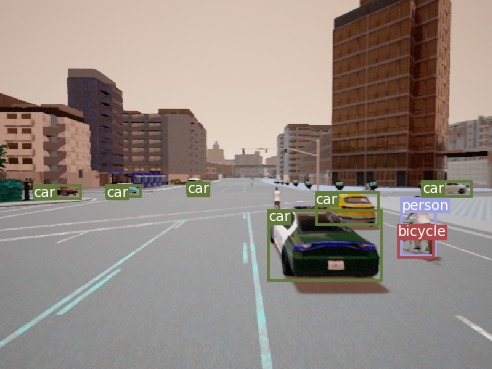
The approach we have adopted involves using sensor data such as depth maps and camera images to gauge the environment, CV techniques and deep learning CNN for object detection and segmentation, and reinforcement learning CNN for controlling the vehicle. The RL CNN is trained using Proximal Policy Optimization (PPO).




Leave a Comment